PCF8574: Is this the Simplest I/O Expander
Ever? How does this device work when it has no Internal Control
Registers? Yet it allows a processor to Read from, or Write to each pin
very easily. Find out its Secret Here.
The PCF8574:
It is an I2C port expander with 8 I/O pins.
I/O is quasi bidirectional!
It has a maximum I2C speed of 100kHz - there are faster drop in replacements.
Comes in a 16 pin DIP package (and others).
Up to 64 I/O pins on a single I2C bus.
Up to 128 I/O pins if you use PCF8574A chips as well.
It has no control registers and is therefore faster and simpler to program.
The PCF8594 is quite unusual in that it has No Internal Control Registers!
All you have is an internal state machine that operates the I2C
interface, and all you can do is write an I2C address (with R/W bit) and
then read data from, or write data to the chip.
The interesting thing is that the pins are bidirectional without
using any register bit in the chip to set the direction. The datasheet
indicates that all pins are quasi-bidirectional and that they can be
used as either inputs or outputs as desired.
So how does it work?
You can find a detailed operational description below but essentially
it uses a weak high-side output current source that can be overridden.
When you set the output high the top (weak current) p-channel MOSFET is enabled and the bottom n-channel MOSFET is disabled.
When your external circuit then drives low - a long as it pulls more
than 300uA it will pull the top MOSFET down. It means the chip can read
the external input. When the external signal drives high it complements
the top MOSFET action and the pin will be read as high.
So no control signals are required just set the output high to read an input (even thought that sounds bizarre).
[1] You can buy a drop in replacement for 400kHz clock capability : PCA8574.
[2] Using a additional chip type PCF8574A, you can
double the number of chips on the I2C bus as its address starts from
0x38.
[*] The asymmetrical pin operation is intentional and intended for driving high current when pulling low.
Note: For 2x the amount of I/O pins add PCF8574A (Uses different Addresses).
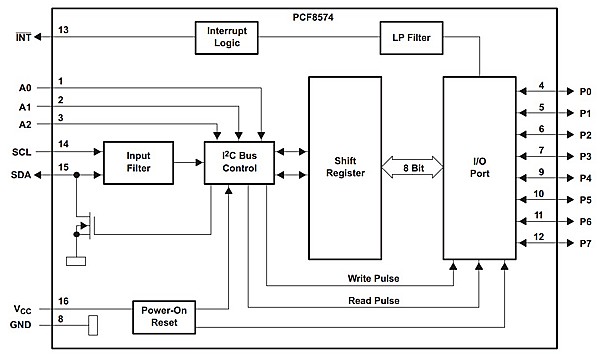
Block diagram of the PCF8597
Warning: There are no internal pullups you have to supply your own resistors.
PCF8574 pin block diagram
How a PCF8574 I/O Pin Works:
There are two quotes from the datasheet that are relevant:
"At power on, the I/Os are high. In this mode,
only a current source to VCC is active"
"The I/Os should be high before being
used as inputs."
Referring to the PCF8574 pin block diagram.
When the output d-type (the top one) is set high (H), the signal goes
through an inverter and the signal goes low (L) and on to the gate of
the two output MOSFETs so the top MOSFET (p-type) is on, while the other is off
(n-type). So the top MOSFET with its 100uA current source is connected
to the output pin.
The data sheet indicates the output (into a grounded load) is
nominally 100uA source current but can vary from 30uA to 300uA. It can
not supply huge current when the output is set high and can not supply
more (Abs max are overload values).
Note that the high current MOSFET (the strong pullup, not the 100uA current source) is
enabled (NAND Gate = L) when the output register is high (OUTPUT =1) AND the write pulse
is high (WRITE). So, for reading it is not active.
This diagram from the datasheet shows simplified operation:
The top MOSFET (in the pin block diagram) is the accelerator pull-up and
its only purpose is to put more current into a load when the PCF8574
output is high (and only during half of the ACK duration; see the
'write' timing diagram in the datasheet). This gives a faster rising
edge into a capacitive load - for the rest of the time (during output)
the 100uA pull-up source takes over.
The reason the accelerator pull-up MOSFET exists is to compensate for
the weak current source that is needed to allow a pin to be an input.
In write mode the current drive is asymmetric and without the
accelerator pulling down gives 10mA drive, but pulling up gives 100uA
drive. Without the accelerator, for any load with any capacitance, the
voltage will fall quickly, but rise slowly. The accelerator compensates
by driving high current for a short time (during half ACK time) to give a
burst of current that forces the output to rise quickly.
Reading a pin as Input
To read a pin the output d-type must be set high enabling the weak 100uA
pullup but more importantly disabling the lower output MOSFET.
Input High
When the input voltage at the pin is high no current flows and the PCF8574 reads logic '1'.
Input Low
When the input voltage at the pin is low a current of 100uA must be
sunk by the external circuit to pull down the voltage at the pin. So it
must pull harder than 100uA (300uA max) for the PCF8574 to read a logic
'0'.
Writing a pin as Output
Output High
When writing a logic '1', as mentioned the accelerator pullup
operates for half the ACK pulse then the 100uA weak pullup stays active.
When driving an output high you can not sink much current (30uA ~
300uA, nominally 100uA) if you take more current then the output voltage
will be lower possibly causing an invalid logic level.
If you drive into normal CMOS inputs then hardly any current is
drawn, so there is no problem but driving into other high current loads
will cause problems i.e. don't drive an LED referenced to Ground.
Output Low
There is no current sink limit for the n-type MOSFET so you can sink
current through it (10mA ~ 25mA). If you want to drive 8 LEDs then then
the recommended max package current is 80mA. So driving each at 10mA is
ideal.
TIP: Drive LEDs referenced to Vcc as higher output current is available.
PCF8574 Interrupts
Any change between the last read pin value (stored in lower d-type) and the current input pin value generates an interrupt.
Warning: Interrupt state is not stored - transient interrupts may be missed.
Because this is a simple device no interrupt signal is stored. It is
simply generated by an XOR gate using the d-type 'read' value and the
pin value (pin block diagram - lower XOR gate). Consequently interrupt
states must be long lived, and any short term ones will be missed.
Note: There are no interrupt masks and no interrupt stored state (as
you get with the MCP32017 - with that device you can read the interrupt
flag register to find out which interrupt triggered the interrupt signal
- at the time it was triggered).
You could get the situation where an interrupt is triggered to the
processor e.g. it detects a falling edge but when it gets around to
reading the interrupt, the condition that caused the interrupt has gone.
In that case you won't know why the interrupt triggered and there's no
way to find out!
PCF8574 I2C Speed
Although the maximum speed of the PCF8574 is defined in the specifications as 100kHz. There is reference to 400kHz operation
- in Application Curves Section 9.2.3 where standard and fast mode
curves are shown in graph R pullup vs Bus Capacitance.
The question is why has 400kHz operation been removed from the
datasheet. It is probably due to internal capacitance variation in production.
You can buy different versions of this chip that are 400kHz capable:
PCA8574. The PCA9674 is capable of 1MHz operation. These are drop in
replacements.
Conclusions
It has an unusually simple architecture but it works, and it can be a cheaper alternative.
Less Complicated so Less Code Needed
One interesting point about the PCF8574 is that because it is so basic, having no internal registers (other than input and
output d-types, and the main shift register), programming of the device
is extremely simple. It means you don't have to control it with lots of
setup code, and every interaction with the device is simple. All you need is an I2C library - the "wire library".
If you need to save programming memory in your microcontroller, this
device will use less code than an equivalent device e.g. MCP23017. So
overall, the amount of code used to control it will be less than a more
complex chip. However I expect it will not make huge code savings.
Quasi bi-directional
Since there are no control registers (except bit stores for output
and input), the only control is the output one - set it high to allow
input. It sounds wrong but in this state the low side n-type MOSFET is
off and the high side p-type MOSFET is on. The key is the the high side
p-type MOSFET has limiting circuit to give only a weak current output -
that can be overridden by external circuitry.
When reading a pin, external circuits must drive enough current to overcome the weak internal current source.
Current Output
The output drive is asymmetric to allow the quasi bi-directional pin
operation. When driving low, current can be sunk (up to 25mA) when
driving high, current can only be sourced to 100uA. So arrange your circuit to drive LEDs when
the output is set low.
Arduino Float to String: Is there a simple function that does this for you? What is the one thing you must do to ensure your program is reliable?: Find out here.








Comments
Have your say about what you just read! Leave me a comment in the box below.
Don’t see the comments box? Log in to your Facebook account, give Facebook consent, then return to this page and refresh it.