MCP4725: Easily Generate a True
Analogue Voltage using
this Tiny Chip. This is a 12 bit DAC (with
memory) to output a voltage for controlling analogue
systems such as a PSU level or opamp offsets.
MCP4725:
A 12bit DAC that outputs a proportion of
the Supply Voltage.
Outputs a True Analog voltage.
Find out if you can use it as a signal generator
(Ans: a bit slow!).
Similar chips 4726 vs 4725: Why you might
want to use an MCP4726.
The MCP4725 is an analogue DAC - it generates a voltage
at its output just like a potentiometer. The difference
is that this chip sets the
output via digital control with a voltage buffer that is
controlled from an I2C serial
interface.
It outputs a proportion of the
input voltage. Since it's a 12bit device its
resolution is Vref/4096. So you can choose very fine
steps dividing down from the reference.
It also contains an EEPROM memory so the device can
power up immediately to an output voltage
without requiring programming each time. You obviously
have to program it the first time, but after that it
remembers the voltage
setting.
This is useful in a production setup environment where
you program in opamp offsets during production, then the
main system program does not need to worry about them.
This page also compares the MCP4726 with the MCP4725
since they are very similar devices. The main difference
is that the 4726 has a reference
voltage input - there are other differences
as well.
MCP4725 Breakout
board
In the breakout board, the three solder blobs labelled
ADDR let you control the value of A0 which changes the i2C address of the chip. The
chip is upside down with A0 at bottom left which
connects to the middle 'ADDR' solder blob. A0 is used to
select from one of two I2C addresses.
The resistor to the right of the solder blobs should be
a 1k pull-down but it was put in
series from GND to the middle solder blob, so it does
nothing - that 1k
is useless - that means you must solder something
otherwise the address input is left floating and you may
get random operation!
You have to solder either the top 2 blobs (A0=0), or
the bottom two
blobs (A0=1) forming a solder bridge, otherwise A0 is
left floating. Don't solder them all together - it will
short the
supply!
The two top resistors are 4k7 and pull-ups for SDA and
SCL. On the
back there are "cut-tracks" that can be cut to isolate
these resistors.
Cut these "cut tracks" if there are already pull-ups
with other attached I2C devices.
[1] For more devices on a
single I2C bus order pre-programmed devices.
[2] A number
below 1 LSB means no codes are missed.
[3] Code Range 100 to 4000 (see Accuracy)
I2C Address
Addressing Scheme
The MCP4725 has a single A0
address input pin, meaning that only two
devices can be placed on a single I2C bus. However there
is a workaround that allows you to place 8 devices on a
single bus.
Warning: You can only
use two devices on a single I2C bus unless...
The work around is that you must order different
versions of the
MCP4725 that have hard coded A1 and A2 address bits
programmed in at the time of manufacture.
MCP4725 Address
mapping
The lower three bits of the address consist of the
three digital
inputs A2, A1, A0 while the upper bits are fixed at
1100xxx. A1
and A2 are assigned at manufacture and will usually be
zero.
The the last bit( LSB ' 'L), sent following the address
bits, is ignored as it is the read write bit (R/Wn).
Therefore the addresses with only A0 available as an
address control are:
0x60, 0x61
For each device you can set A0 to one or zero. The rest
(A1 and A2) are specified on purchase.
I2C commands
There are two write commands
and one read command (Datasheet Table 6-2):
Fast mode DAC register write.
Write DAC control register (optional EEPROM write).
Writing
The first command "Fst Mode" (Datasheet Figure 6-1) is
a fast update command and writes only to the DAC
register and does not update the EEPROM. It also uses a
different data format to the second. It allows the data
to fit
into two bytes whereas the second format uses three.
1st command uses 2 data bytes making 3 I2C packets
(including address).
2nd command uses 3 data bytes making 4 I2C packets
(including address).
Confusingly when you use the second command (Datasheet
Figure 6-2)
and set C2,C1,C0 to 010 it has the same effect as the
first command and
just sets the DAC registers but does not program the
EEPROM.
The real use of the second command is to update the
EEPROM as well
when C2,C1,C0 = 011. In this case a new command can not
be used until
the EEPROM has finished being written.
Warning: An EEPROM
update takes up to 50ms and blocks operation.
EEPROM write can take up to 50ms (typically 20ms ) and
no other
action is allowed until the update is completed (Read
the RDY/BSYn flag
to check).
Faster updates
To avoid really slow operation, use the first command that does not write
to the EEPROM - this is the "Fast Update" command.
To improve the speed of operation a bit more you can
repeat the data
packet so you don't have to stop and start the I2C. So
instead of a stop bit at the end of an I2C
transaction you just repeat the two data bytes that
update the DAC
output. The output is then continuously updated at the
end of every
second I2C ACK signal.
This means you can update the output at a rate
determined by the
transmission speed of 2 I2C packets (an I2C packet holds
8 bits and you
need 12 bits so 2 packets are needed).
Note: I2C
operation is not that fast. Speed test results are here.
Reading
For reading data back, you set the R/Wn bit in the
first I2C packet high (Datasheet Figure 6-3).
Then you read back 5 bytes from the MCP4725. The first
byte contains the RDY/BSYn bit which is used to check if
an EEPROM write has completed.
Accuracy
There are several factors that contribute to the
MCP4725 accuracy:
Warning: The code
range used is the biggest factor affecting accuracy.
The datasheet suggests that to get 1% accuracy use only
codes between 100 and 4900 due to opamp saturation.
Code Range
At the top and bottom end of MCP4725 DAC codes, the
linearity of the
output becomes worse. The recommended area of use is for
a code output range of 100 to 4000, which is the range
defined for measurement of INL
and DNL.
This is the datasheet diagram showing the transfer
function across
the whole range of codes. You can see that at higher
codes the
transfer function departs from the straight line. For
codes below
100 the output is also non linear (not shown). This is
why INL and
DNL measurements are defined only for codes 100 ~ 4000.
[Source: Datasheet]
MCP4725 Uses
Once you have setup the desired voltage, the beauty of
the chip is that
you can program the internal EEPROM to output the same
voltage at every
power-up .i.e. you calibrate the unit and it is
set-and-forget.
There are several uses for the chip:
Calibration.
Repeated output (remembers output after power down).
Waveform generation (very slow with Arduino Uno -
use DSP e.g. ESP32).
Calibration
The ideal use for this chip is to setup fixed output
voltages for
calibration of a unit. Once you have calibrated the
system the chip will remember the output setting and
output the same voltage at power up.
Digital Power Supply
Another use could be in a digital power supply where
you want the
output to keep the same value that was last set i.e a
programmable power supply.
Waveform Generation
You could use it to generate waveforms (fairly slow)
but it can you can speed it up using the fast mode DAC write command.
Using the I2C 3.4MHz
mode would make the output dependent only on the chip
specification of
slew rate and settling time, and command used (plus a
bit more for the serial interface
update). Don't forget processor speed of update i.e. how
fast round the main loop (or use and interrupt generated
update).
Disadvantages
No separate reference voltage input.
Limited addressing.
No Synchronous update.
The Voltage Reference is the Supply
One problem is that the chip uses the supply voltage as
the reference voltage source. Supply voltage chips
generally have a tolerance, specified by the
manufacturer of between 2% and 10% so you can end up
with this tolerance at the output. (See this
page for some measurements on 5V supply variation)
You could get around this by the MCP4725 with an
accurate voltage
reference at the VDD pin, but then you need
to make sure that the reference is
capable of supplying all attached chips with enough
current.
Alternatively use the MCP4726
which also has an optional buffer amplifier at the
reference input pin.
Addressing
The addressing scheme is discussed here (it is a bit limited).
Synchronised Update
This is a subtle disadvantage. You can not update the
outputs of
multiple MCP4725 at the same time. This is not really a
disadvantage of
the chip - it is just something you might not think
about unless you
really need this feature.
You can only update each MCP4725 using and individual
I2C sequence,
so if you have 8 chips it is going to take 8 I2C data
packets which
takes time. If you really need synchronous updates use
the MCP4728
or MCP4922
that have a hardware update control signal.
Then enter MCP4725 in the search box which will show
the result:
Adafruit_MCP4725 by Adafruit Version 1.0.0 - Click
Install.
You can see that the library is installed by going to
Menu:
Sketch-->Include Library, scroll down in the drop
down box that appears and
you will see an entry labelled : Adafruit MCP4725
Library.
Library Notes
The code in this library always uses the 400kHz I2C
mode. It
does this by storing the current TWBR value and
restoring it at the end
of the function setVoltage(). So whatever you do you
can't change the
speed unless you edit the library code
(Adafruit_MCP4725.cpp). This is probably about as fast
as the UNO can go.
#ifdef TWBR
uint8_t twbrback = TWBR;
TWBR = ((F_CPU / 400000L) -
16) / 2; // Set I2C frequency to 400kHz
#endif
The definition TWBR is set elsewhere to indicate that
the processor has a TWBR register.
Warning: Don't
continuously write to the EEPROM as it has a lifetime.
The second parameter, in the setVoltage() function, writes
the EEPROM if set true.
Hardware
Components
Arduino Uno R3/Arduino Nano.
MCP4725 breakout board (Use A0 solder bridge to
GND).
Connection wires.
Connections
For testing use an Arduino Uno and connect it as
follows:
Arduino
MCP4725
5V
VDD
GND
GND
A5
SCL
A4
SDA
GND
A0
Example Sketch
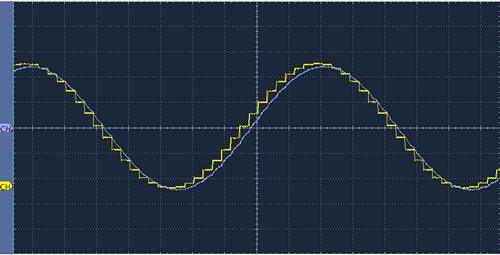
This example generates a sinewave output using stored
values that are
programmed into the Flash memory. Note that this does
not use the fast
method mentioned here.
The Arduino output is using I2C at 400kHz.
This sketch is setup using 32 intervals in a complete
sine wave (16 steps from top to bottom). So
that
is going through 360/32 degrees and obtaining a DAC
result for each
angle. It is setup with 1V per division and has a frequency
of 218Hz. If you used fast
updates you would get slightly better than double
the frequency.
Timebase: 500us/div, Yellow 1V/div.
For this interval each step represents 5/16 = 312mV.
The chip is capable of a resolution of 4096 giving steps
of 5/4096 = 1.2mV.
The second waveform shows the I2C clock. You can see
that there are
four 9 bit I2C packets per update. The clock period is
2.5us, 1/T =
400kHz.
Notice also how there is noise on the output (image
below) - this could be
reduced by power supply filtering, output
filtering and board
layout (possibly). The screen shot below has the
yellow channel at 50mV
per division. It shows noise from the I2C packets
imposed on the output
(~30mVpp noise).
Timebase: 10us/div, Blue 10v/Div, Yellow 50mV/div.
The implication is, that for accuracy the I2C
interface should be shutdown while a measurement is
made (when using the MCP4725 as a
calibration output).
Filtering the output using a 10k and 100nF to GND
(fc=159Hz) gives the following waveforms:
The 400kHz signal is attenuated out but there is still
system noise.
Timebase: 10us/div, Yellow 10v/Div, Blue 50mV/div.
The full waveform is here (10k ,100nF):
You can see that the above output (blue) is phase
shifted and
attenuated. This is a problem if you want to generate
waveforms. If you
only need a dc output then noise will be filtered out
better by the 10k
and 100nF filter. The effect will be a longer settling
time after
changing the DAC output.
If you relax the filter to 10k and 100n Fc=1.59kHz.
Then you get an
output that is closer to the original i.e. it is not
attenuated and not
phase shifted as much because the corner frequency of
the filter (Fc) is a long way from 218Hz. However,
system noise will be increased.
Timebase:500us/div, Yellow 1V/div, Blue 1V/div.
Note the output of the voltage regulator is 4.76V.
Theoretical
maximum speed
Approximately how fast could this chip go in generating
a 32 bit sinewave?
The sinewave goes through a cycle of 32 bits from max
to min, and then to max again, so from top to bottom
there are 16 steps.
Ignoring slew rate, and settling time, and processor
time. From the
waveforms you can see that 4*9=36 bits must be output.
If the clock is 3.4Mhz (MAX I2C speed) then this would
take 39*(1/3.4e6) = 11.47us.
To generate 32 segments will take 32*11.47e-6=367us.
That generates a frequency of 1/367e-6 = 2.724kHz.
This is the maximum theoretical sine wave (using normal
Stop/Start I2C transmission) - remember this is a
low
resolution sine wave and would slow down if more
segments were needed.
Warning: This is a
low resolution sinewave. More steps = slower.
You could increase the speed using the fast mode by 25%
(sending only 3 packets) ~ 3.4kHz.
If you use the continuous update method where you don't
release the I2C
bus, then you can double the output rate to 5.9kHz. This
output
generator should be controlled from a priority interrupt
routine.
Warning: Calculations
assume the processor is dedicated to this task!
MCP4726
This section allows you to compare the MCP4726 to the
MPC4725.
The MCP4726 is nearly the same as the MCP4725 but has
two new features:
An external reference input with optional input
buffer.
A gain selectable opamp.
By adding the external reference input, the address pin
A0 is lost, so the device has an even more restricted
address capability (you have to
order pre-programmed devices if you want more than one
device on a
single I2C bus).
From the above diagram you can see that the reference
section and opamp have been enhanced.
For the reference you can select between:
Power supply as reference.
Unbuffered input pin as reference.
Buffered input pin as reference.
The first is obvious!
When using the second option (unbuffered input) the
voltage source
must be able to drive enough current into the ~210kOhm
(±20%) resistor
ladder.
The third option is used when you can't load the
voltage reference
source (you should try to use a source that can drive
enough current).
Using the buffer amplifier does result in a slight
reduction in input
range (10mV ~ VDD-40mV). the buffer amplifier
has low noise and low offset voltage but they are not
zero
Opamp
The opamp has a selectable gain of 1 or 2. So if you
have a low
voltage reference e.g. 1.25V you can double it up as
long as the voltage input at the reference voltage pin
remains below Vdd/2.
MCP4726
compared to MCP4725
The MCP4726 is virtually identical to the MCP4725 but
has two new features:
An external reference input.
A gain selectable opamp (x1 or x2 gain).
The MPC4726 addresses the main problem of the MCP4725 -
that the power supply
is used as a reference. This is not the best thing to
use if you want to create a highly accurate system.
What you really want is a separate input pin to supply
your own
defined and accurate reference and this is exactly what
has happened in
the MCP4726. However, a sacrifice was made and that was
to change
the function of a pin.
The only pin that can be replaced (in the same package
size) is the A0 (address input pin).
This pin has been turned into the reference input pin in
the MCP4726.
[1] For more devices on a
single I2C bus order pre-programmed devices.
[2] A number below 1 LSB means no codes are
missed.
[3] Code Range 100 to 4000
(see Accuracy)
Note: Other parameters specific to
the MCP4726 are not listed here.
Note: Current consumed is more than
the MCP4725 as more is going on.
MCP4726 Advantages
MCP4726 Accepts an external reference voltage the
MCP4725 does not.
They both use the same package: SOT-23-6.
Selectable gain opamp (G=1 or 2).
Very low typical power down current (only a bit
worse than the MCP4725).
MCP4726
Disadvantages
Its address capability is even less than the
MCP4725; It does not have an address input. To get more
than one chip on a single I2C bus requires that you
buy different
devices with pre-programmed addresses built in!
You use up to 8 devices on the same I2C bus but must
specify the A0, A1 and A2 address bits on ordering.
Conclusions
General Usage
These chips (MCP4725 and MCP4726) are very useful for
sprinkling around a board as they
occupy very little board area, and can be tied to a
single I2C bus. You
can use them to setup calibration for analogue circuits
with ease.
Note: The
(typical) power down current is very low for these
chips.
The only fly-in-the-ointment is that for more than 2
(MCP4725), and
for more than 1 (MCP4726) you have to order differently
programmed
devices from the manufacture in order to make use of the
full address
range of each chip (max 8 of either type on a single I2C
bus).
For a large firm, this is just a procurement exercise,
then feeding the chips into the correct slot on the pick
and place machine. If you are
going to debug this system, it is another matter. You'll
be sitting on
the bench figuring out which SMD device is which, and
trying to keep it
all under control.
You can find out more about the MCP4728 here, where you'll see how it
incorporates ideas from the MCP4726 and MCP4725.
Waveform
generation
The MCP4725 is not really useful as a waveform
generator and for the
Arduino Uno the maximum output frequency is 218Hz for a
16 step
waveform!
If you increase the number of steps to 4096 it is going
to take a very long time to output a waveform so it will
have even lower frequency. Testing shows a 9 bit
waveform
512 elements (256 top to bottom) gives: 13.66Hz.
However the examples in this document use a maximum I2C
speed of
400kHz (dependent on the Arduino Uno speed). The chip is
capable of a 3.4MHz speed. If you used a faster
processor
then the output rate would be increased but does this
make much
difference? The rate would increase from 400kHz to
3400kHz which is a factor
of 8.5. So the above outputs would increase from 218Hz
to 1853Hz (16
steps), and 13.66Hz to 116.11Hz (256 steps). So in fact
these are still
not impressive speeds.
As you can see from the "Theoretical maximum
speed" even using a DSP processor will only result
in a maximum output rate of 2.7kHz (this is again
generating only a 32 bit sinewave with 16 steps
top to bottom). You can push this to 5.9kHz with
continuous output mode
but the processor is dedicated to this task alone.
Alternatively use an SPI version of the DAC: MCP4922. However, even with
that device the theoretical maximum output frequency is
39kHz i.e 10 times better - this is still only for a 16
step
waveform so not as good as it sounds!
If you really want high speed output you need a
dedicated DDS such as an AD9833
(this is not a DAC though and generates sine, triangle
or a square wave at up to12.5MHz).
Another alternative is to use a parallel DAC such as
the 8bit DAC
from Analogue Devices DAC08. With that one you can write
8 bits on a parallel bus so its fast (updating within
85ns). Speed = 1.0/(512 * 85e-9) = 22.9kHz (if you can
drive it that fast!).
Arduino Float to String: Is there a simple function that does this for you? What is the one thing you must do to ensure your program is reliable?: Find out here.
















Comments
Have your say about what you just read! Leave me a comment in the box below.
Don’t see the comments box? Log in to your Facebook account, give Facebook consent, then return to this page and refresh it.